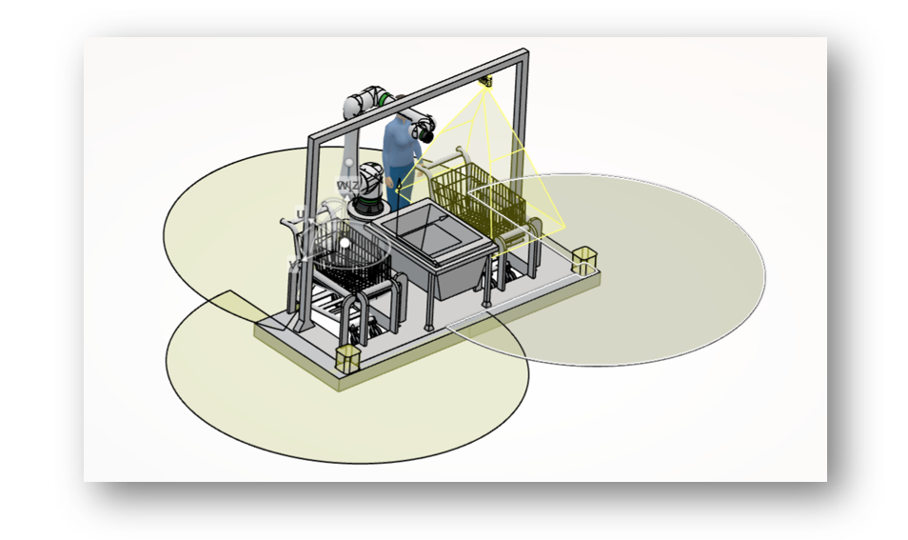
CoboSort solution has been defined. It is a modular human-robot collaborative system that makes use of a collaborative robot and dedicated safety sensors to enable safe interaction with operators. By means of this prototype version, all the tests required to evaluate, improve, and optimize the solution will be performed. Mainly, the training and optimization of the machine learning algorithms thanks to a continuous collection of all the images related to the garments to be grasped from the trolleys. Furthermore, the performances of the gripper system are also designed for the application. With the layout proposed, the trolleys are located in two different zones that are monitored by two RGBD cameras (provides both depth (D) and color (RGB) data) laced on the top of both the zones. In this initial configuration, the collecting area where to release the grasped objects is placed in between the two zones dedicated to the trolleys.
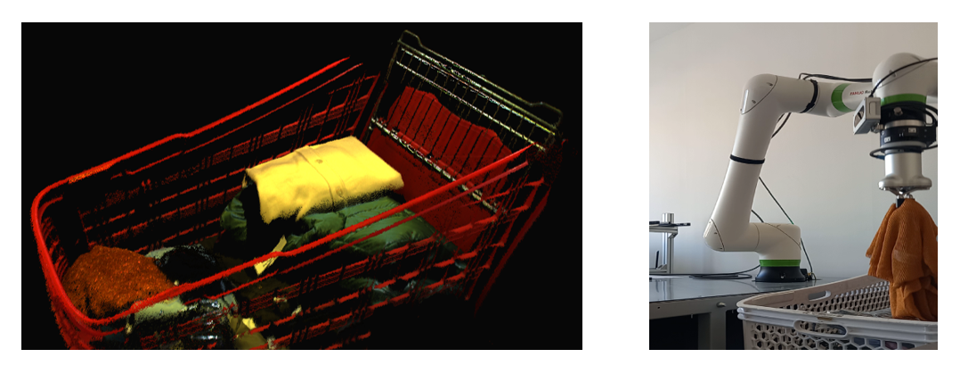
Concurrently, initial tests on vision and grasping systems are providing promising results.